




גליסוןגלגלי שיניים ספירליים משופעיםהם סוג מיוחד של גלגל שיניים משופע שנועד להעביר כוח בין צירים מצטלבים, בדרך כלל בזווית של 90 מעלות. מה שמייחד את מערכת גליסון הוא גיאומטריית השיניים הייחודית שלה ושיטת הייצור, המספקות תנועה חלקה, קיבולת מומנט גבוהה ופעולה שקטה. גלגלי שיניים אלה נמצאים בשימוש נרחב בתיבות הילוכים לרכב, תעשייה וחלל, שבהן אמינות ודיוק הם קריטיים.
שיטת גליסון פותחה כדי לשפר את הישר והגלגלי שיניים משופעים אפסעל ידי הכנסת שן מעוקלת בצורת ספירלה. צורה ספירלית זו מאפשרת חיבור הדרגתי בין השיניים, מה שמפחית משמעותית את הרעש והוויברציות תוך מתן אפשרות למהירויות סיבוב וקיבולת עומס גבוהות יותר. העיצוב גם משפר את יחס המגע ואת חוזק פני השטח, ומבטיח העברת כוח יעילה תחת עומסים כבדים או דינמיים.
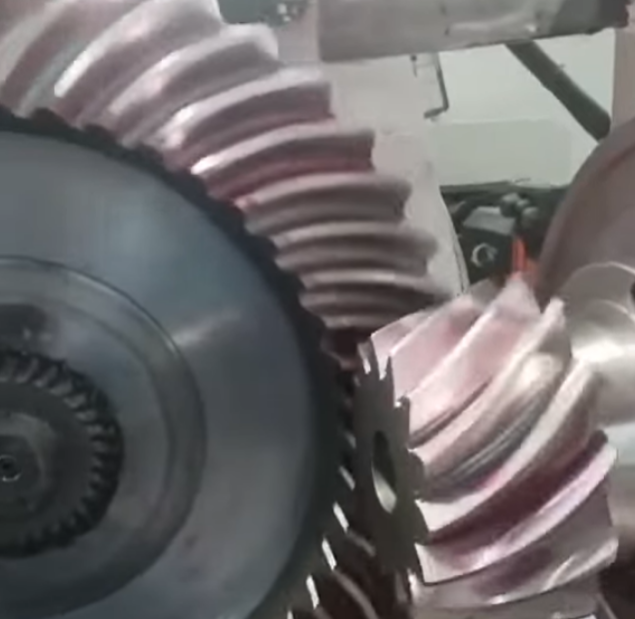
כל זוג גלגלי שיניים ספירליים משופעים של גליסון מורכב מגלגל שיניים וגלגל שיניים תואם, המיוצרים בגיאומטריה תואמת. תהליך הייצור הוא מיוחד ביותר. הוא מתחיל בחישול או יציקה מדויקת של חלקי סגסוגת פלדה, כגון 18CrNiMo7-6, ולאחר מכן חיתוך גס, חריטה או עיצוב ליצירת צורת הגלגל הראשונית. שיטות מתקדמות כמו עיבוד שבבי 5 צירים, חיתוך קשה וחיתוך קשה מבטיחות דיוק מימדי גבוה וגימור פני שטח אופטימלי. לאחר טיפול בחום כגון קרבוריזציה (58-60 HRC), גלגלי השיניים עוברים ליטופים או השחזה כדי להשיג רשת מושלמת בין הגלגל השיניים לגלגל השיניים.
הגיאומטריה של גלגלי שיניים ספירליים משופעים מדגם גליסון מוגדרת על ידי מספר פרמטרים קריטיים - זווית ספירלית, זווית לחץ, מרחק חרוט גובה ורוחב פנים. פרמטרים אלה מחושבים במדויק כדי להבטיח דפוסי מגע נכונים בין השיניים וחלוקת עומס. במהלך הבדיקה הסופית, כלים כגון מכונת מדידת קואורדינטות (CMM) וניתוח מגע שיניים (TCA) מאמתים שמערכת גלגלי השיניים עומדת ברמת הדיוק הנדרשת של DIN 6 או ISO 1328-1.

בפעולה, ספירלת גליסוןגלגלי שיניים משופעיםמציעים יעילות גבוהה וביצועים יציבים גם בתנאים תובעניים. השיניים המעוקלות מספקות מגע רציף, ומפחיתות את ריכוז המאמץ והבלאי. זה הופך אותן לאידיאליות עבור דיפרנציאלים לרכב, תיבות הילוכים למשאיות, ציוד כבד, מערכות הנעה ימיות וכלי עבודה חשמליים. בנוסף, היכולת להתאים אישית את גיאומטריית השיניים ואת מרחק ההרכבה מאפשרת למהנדסים לייעל את התכנון עבור אילוצי מומנט, מהירות ומקום ספציפיים.
גלגל שיניים ספירלי משופע מסוג גליסון - טבלת חישוב מרכזית
| פָּרִיט | נוסחה / ביטוי | משתנים / הערות |
|---|---|---|
| פרמטרי קלט | (z_1, z_2, m_n, alpha_n, סיגמא, b, T) | שיני גלגל שיניים/פיניון (z); מודול רגיל (m_n); זווית לחץ רגילה (α_n); זווית ציר (Sigma); רוחב פנים (b); מומנט מועבר (T). |
| קוטר ייחוס (ממוצע) | (d_i = z_i, m_n) | i = 1 (גלגל שיניים), 2 (גלגל שיניים). קוטר ממוצע/קוטר ייחוס בחתך הרגיל. |
| זוויות גובה (חרוט) | (Δ1, Δ2) כך ש-(Δ1 + Δ2 = ΔSigma) ו-(Δ1 = Δsin Δ2}{d2) | פתור עבור זוויות חרוט התואמות את פרופורציות השיניים וזווית הפיר. |
| מרחק קונוס (מרחק שיא הגובה) | (R = \dfrac{d_1}{2\sin\delta_1} = \dfrac{d_2}{2\sin\delta_2}) | המרחק מקודקוד החרוט למעגל הגובה נמדד לאורך הגנרטריקס. |
| גובה צליל מעגלי (רגיל) | (p_n = π m_n) | גובה ליניארי בקטע הרגיל. |
| מודול רוחבי (בקירוב) | (m_t = \dfrac{m_n}{\cos\beta_n}) | (βn) = זווית ספירלית נורמלית; עובר בין חתכים נורמליים לחתכים רוחביים לפי הצורך. |
| זווית ספירלית (יחס ממוצע/רוחב) | (\tan\beta_t = \tan\beta_n \cos\delta_m) | Δm = זווית חרוט ממוצעת; השתמש בטרנספורמציות בין זוויות רגילות, רוחביות וספירליות ממוצעות. |
| המלצה על רוחב פנים | (b = k_b, m_n) | (k_b) נבחר בדרך כלל בין 8 ל-20 בהתאם לגודל וליישום; יש להתייעץ עם מומחי התכנון לקבלת הערך המדויק. |
| תוספת (ממוצע) | (a \בערך m_n) | קירוב סטנדרטי של תוספת עומק מלא; השתמש בטבלאות פרופורציות שיניים מדויקות לקבלת ערכים מדויקים. |
| קוטר חיצוני (קצה) | (d_{o,i} = d_i + 2a) | אני = 1,2 |
| קוטר השורש | (d_{f,i} = d_i – 2h_f) | (h_f) = דדנדום (מפרופורציות מערכת ההילוכים). |
| עובי שן עגולה (בקירוב) | (s \approx \dfrac{\pi m_n}{2}) | עבור גיאומטריית שיפוע, השתמש בעובי מתוקן מטבלאות שיניים לצורך דיוק. |
| כוח משיקי במעגל גובה הצליל | (F_t = \dfrac{2T}{d_p}) | (T) = מומנט; (d_p) = קוטר פסיעה (השתמשו ביחידות עקביות). |
| מאמץ כיפוף (בפשטות) | (\sigma_b = \dfrac{F_t \cdot K_O \cdot K_V}{b \cdot m_n \cdot Y}) | (K_O) = גורם עומס יתר, (K_V) = גורם דינמי, (Y) = גורם צורה (גיאומטריית כיפוף). יש להשתמש במשוואת כיפוף AGMA/ISO מלאה לצורך התכנון. |
| מאמץ מגע (סוג הרץ, פשוט) | (\sigma_H = C_H \sqrt{\dfrac{F_t}{d_p, b} \cdot \dfrac{1}{\frac{1-\nu_1^2}{E_1} + \frac{1-\nu_2^2}{E_2}}}) | קבוע גיאומטריה (C_H), מודולי אלסטיות החומר (E_i,\nu_i) ויחסי פואסון. השתמש במשוואות מגע-מאמץ מלאות לאימות. |
| יחס מגע (כללי) | (\varepsilon = \dfrac{\text{קשת פעולה}}{\text{גובה הבסיס}}) | עבור גלגלי שיניים משופעים, יש לחשב באמצעות גיאומטריית חרוט גובה וזווית ספירלית; בדרך כלל מוערך באמצעות טבלאות או תוכנות תכנון גלגלי שיניים. |
| מספר שיניים וירטואלי | (z_v \approx \dfrac{d}{m_t}) | שימושי לבדיקות מגע/חתך תחתון; (m_t) = מודול רוחבי. |
| בדיקת שיניים מינימליות / בדיקת חיתוך חתוך | השתמש במצב שיניים מינימלי המבוסס על זווית ספירלית, זווית לחץ ופרופורציות שיניים | אם (z) נמוך מהמינימום, נדרש חיתוך תחתון או כלי עבודה מיוחדים. |
| הגדרות מכונה/חותך (שלב תכנון) | קבע את זוויות ראש החותך, סיבוב העריסה והאינדקס מגיאומטריית מערכת ההילוכים | הגדרות אלו נגזרות מגאומטריית גלגל השיניים וממערכת החיתוך; יש לפעול לפי נוהל המכונה/הכלי. |
טכנולוגיית ייצור מודרנית, כגון מכונות חיתוך והשחזה של גלגלי שיניים משופעים CNC, מבטיחה איכות עקבית ותחלופה. על ידי שילוב תכנון בעזרת מחשב (CAD) וסימולציה, יצרנים יכולים לבצע הנדסה הפוכה ובדיקות וירטואליות לפני הייצור בפועל. זה ממזער את זמן ההובלה והעלות תוך שיפור הדיוק והאמינות.

לסיכום, גלגלי שיניים ספירליים משופעים של גליסון מייצגים את השילוב המושלם של גיאומטריה מתקדמת, חוזק חומר ודיוק ייצור. יכולתם לספק העברת כוח חלקה, יעילה ועמידה הפכה אותם למרכיב הכרחי במערכות הנעה מודרניות. בין אם הם משמשים במגזרי הרכב, התעשייה או התעופה והחלל, גלגלי שיניים אלה ממשיכים להגדיר מצוינות בתנועה ובביצועים מכניים.
זמן פרסום: 24 באוקטובר 2025