




כמנגנון תמסורת, גלגלי שיניים פלנטריים נמצאים בשימוש נרחב בשיטות הנדסיות שונות, כגון מפחית הילוכים, עגורן, מפחית הילוכים פלנטריים וכו'. עבור מפחית הילוכים פלנטריים, הוא יכול להחליף את מנגנון ההילוכים של מערכת הילוכים עם סרן קבוע במקרים רבים. מכיוון שתהליך העברת ההילוכים הוא במגע קו, רשת ממושכת תגרום לכשל בהילוכים, ולכן יש צורך לדמות את חוזקם. לי הונגלי ועמיתיו השתמשו בשיטת הרשת האוטומטית כדי לרשת את גלגל השיניים הפלנטרי, וקיבלו שהמומנט והמאמץ המרבי הם ליניאריים. וואנג יאנג'ון ועמיתיו גם ריתכו את גלגל השיניים הפלנטרי באמצעות שיטת היצירה האוטומטית, ודימו את הסימולציה הסטטית והמודאלית של גלגל השיניים הפלנטרי. במאמר זה, אלמנטים של טטרהדרון והקסהדרון משמשים בעיקר לחלוקת הרשת, והתוצאות הסופיות מנותחות כדי לראות האם תנאי החוזק מתקיימים.
1. הקמת מודל וניתוח תוצאות
מידול תלת מימדי של גלגלי שיניים פלנטריים
גלגל שיניים פלנטרימורכב בעיקר מגלגל שיניים טבעתי, גלגל שיניים שמשי וגלגל שיניים פלנטרי. הפרמטרים העיקריים שנבחרו במאמר זה הם: מספר השיניים של טבעת ההילוכים הפנימית הוא 66, מספר השיניים של גלגל השמש הוא 36, מספר השיניים של גלגל השיניים הפלנטרי הוא 15, הקוטר החיצוני של טבעת ההילוכים הפנימית הוא 150 מ"מ, המודול הוא 2 מ"מ, זווית הלחץ היא 20 מעלות, רוחב השן הוא 20 מ"מ, מקדם הגובה התוספתי הוא 1, מקדם התשובה החד-פעמית הוא 0.25, ויש שלושה גלגלי שיניים פלנטריים.
ניתוח סימולציה סטטית של גלגלי שיניים פלנטריים
הגדרת תכונות חומר: ייבא את מערכת גלגלי השיניים הפלנטריים התלת-ממדיים שצוירו בתוכנת UG לתוך ANSYS, וקבע את פרמטרי החומר, כפי שמוצג בטבלה 1 להלן:

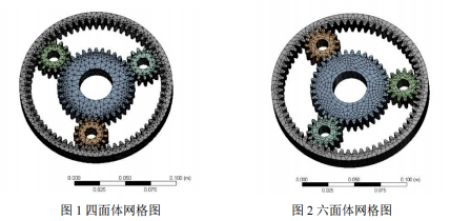
רשת: רשת האלמנטים הסופיים מחולקת לטטרהדרון ולהקסהדרון, והגודל הבסיסי של האלמנט הוא 5 מ"מ. מכיוון ש-גלגל שיניים פלנטרי, גלגל השמש וטבעת גלגל השיניים הפנימית נמצאים במגע ויוצרים רשת, הרשת של חלקי המגע והרשת צפופה, והגודל הוא 2 מ"מ. ראשית, נעשה שימוש ברשתות טטרהדרליות, כפי שמוצג באיור 1. נוצרים 105906 אלמנטים ו-177893 צמתים בסך הכל. לאחר מכן, אומץ רשת משושה, כפי שמוצג באיור 2, ונוצרים 26957 תאים ו-140560 צמתים בסך הכל.
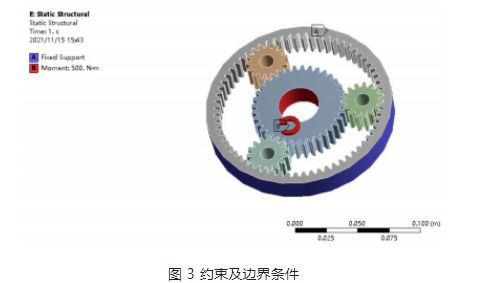
יישום עומס ותנאי גבול: בהתאם למאפייני העבודה של גלגל השיניים הפלנטרי במפחית, גלגל השמש הוא גלגל ההנעה, גלגל השיניים הפלנטרי הוא גלגל ההנעה, והפלט הסופי הוא דרך נושא הפלנטרי. קבע את טבעת הגלגל הפנימית ב-ANSYS, והפעל מומנט של 500 ניוטון מטר על גלגל השמש, כפי שמוצג באיור 3.
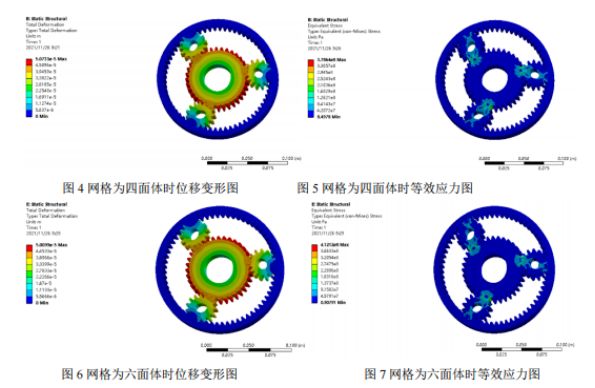
עיבוד לאחר מכן וניתוח תוצאות: נפוגרמת התזוזה ונפוגרמת המאמץ המקבילה של ניתוח סטטי שהתקבלו משתי חלוקות רשת מוצגות להלן, ונערך ניתוח השוואתי. מנפוגרמת התזוזה של שני סוגי הרשתות, נמצא כי התזוזה המקסימלית מתרחשת במיקום שבו גלגל השמש אינו משתלב עם גלגל השיניים הפלנטרי, והמאמץ המקסימלי מתרחש בשורש רשת גלגל השיניים. המאמץ המקסימלי של הרשת הטטרהדרלית הוא 378MPa, והמאמץ המקסימלי של הרשת ההקסהדרלית הוא 412MPa. מכיוון שגבול הכניעה של החומר הוא 785MPa ומקדם הבטיחות הוא 1.5, המאמץ המותר הוא 523MPa. המאמץ המקסימלי של שתי התוצאות נמוך מהמאמץ המותר, ושתיהן עומדות בתנאי החוזק.
2. סיכום
באמצעות סימולציית אלמנטים סופיים של גלגל השיניים הפלנטרי, מתקבלות נפוגרמת דפורמציה של תזוזה ונפוגרמת מאמץ מקבילה של מערכת גלגל השיניים, מהן הנתונים המקסימליים והמינימליים והתפלגותם בגלגל שיניים פלנטריניתן למצוא מודל. מיקום המאמץ המקביל המרבי הוא גם המיקום שבו שיני גלגל השיניים נוטות להיכשל, לכן יש להקדיש לו תשומת לב מיוחדת במהלך התכנון או הייצור. באמצעות ניתוח של כל מערכת גלגל השיניים הפלנטרי, מתגברת על השגיאה הנגרמת מניתוח של שן גלגל שיניים אחת בלבד.
זמן פרסום: 28 בדצמבר 2022